DeepMind Control Suite
DeepMind Control Suite DeepMind Control Suite (DMCS) is a robust and widely adopted testbed designed by DeepMind to facilitate RL research by providing a diverse set of continuous control tasks. It includes environments for locomotion, manipulation, and navigation, each with distinct dynamics and challenges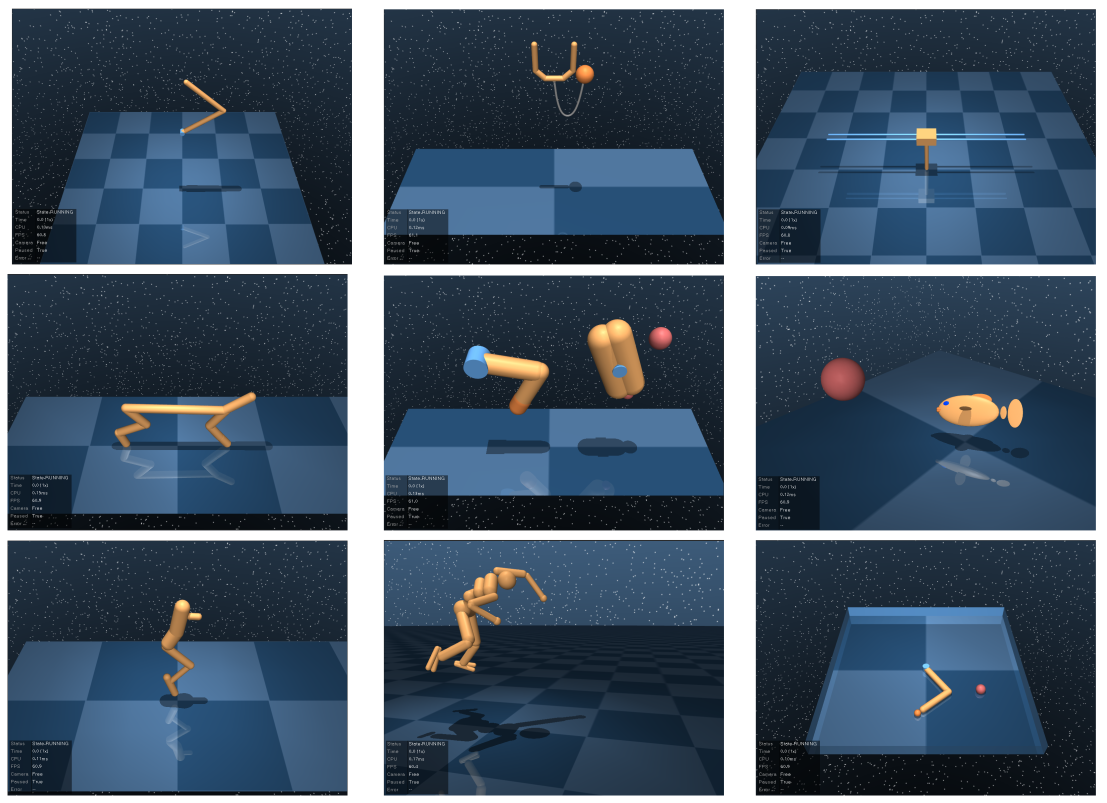
OpenAI Gymnasium and MuJoCo
OpenAI Gymnasium and MuJoCoGymnasium
It is a widely used RL benchmark suite designed to provide a standardized set of environments for developing and evaluating RL algorithms. It offers a diverse collection of tasks, ranging from classic control problems and Atari games to more complex robotics simulations. Gymnasium ensures consistency by defining clear observation spaces, action spaces, and reward structures, making it easier to compare different algorithms. Its flexibility and ease of integration with various RL frameworks have made it one of the most popular platforms in both academia and industry for benchmarking and testing RL approaches.MuJoCo
It is a high-performance physics engine widely used for continuous control RL tasks, particularly in robotics and biomechanics research. It provides realistic simulations with accurate physics modeling, including rigid-body dynamics, contact forces, and friction. MuJoCo environments, often integrated with OpenAI Gymnasium, offer tasks such as robotic arm manipulation, locomotion, and dexterous hand control. The precision and efficiency of its physics engine make MuJoCo a preferred choice for training RL agents in complex, real-world-inspired scenarios.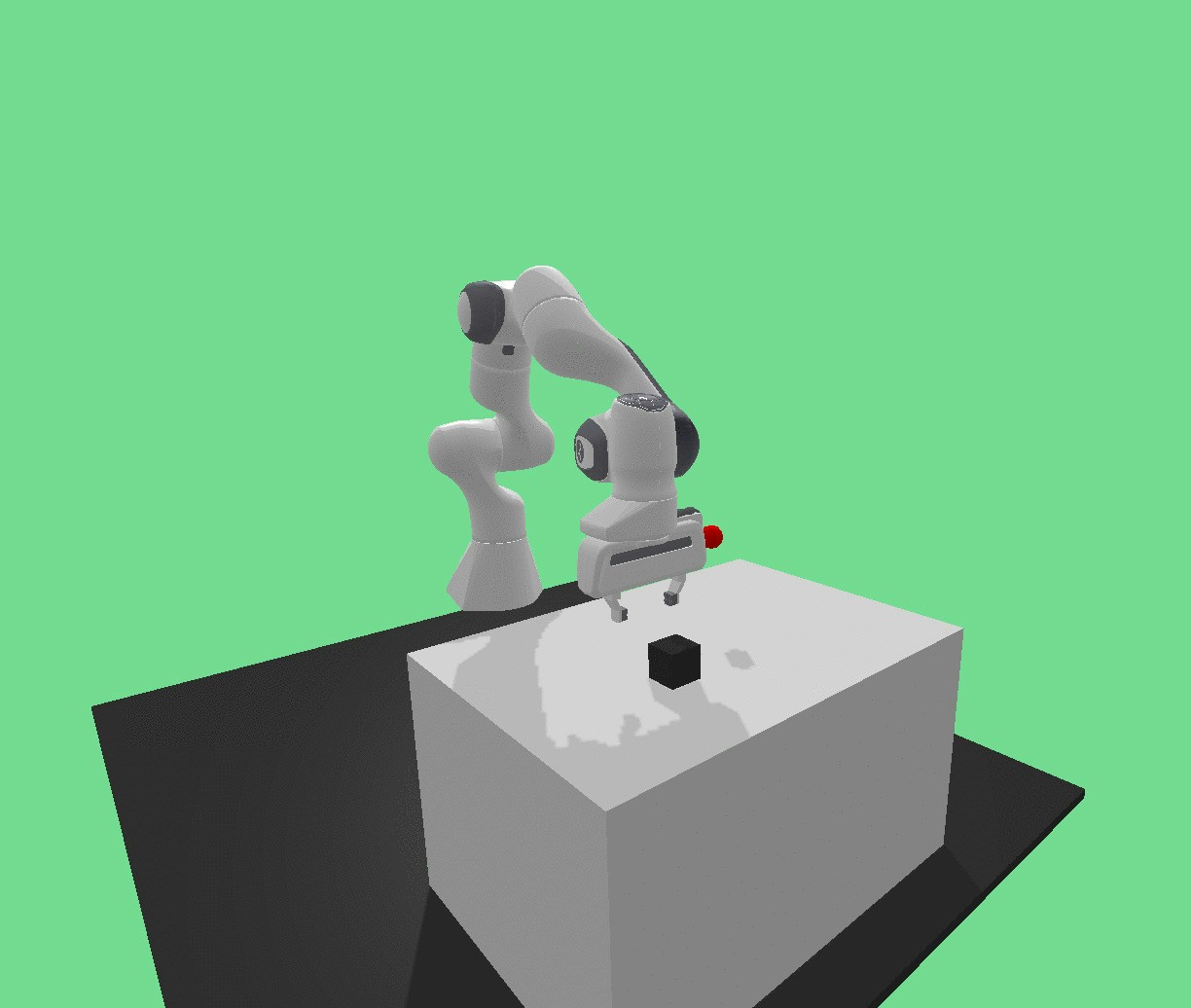
These platforms—DeepMind Control Suite, OpenAI Gymnasium, and MuJoCo—are more than just testbeds; they are the battlegrounds where RL algorithms prove their worth. By standardizing challenges and ensuring fair comparisons, they accelerate innovation and push the boundaries of what AI can achieve, and the best part is that you can access them all in ReinforceUI-Studio.
Algorithms
Algorithms Included on ReiforceUI-Studio
Installation
Check how to install ReinforeUI-Studio